UAV Flight Control System
1. System Overview. A typical UAV Navigation (UAVN) Flight Control System (FCS) consists of:
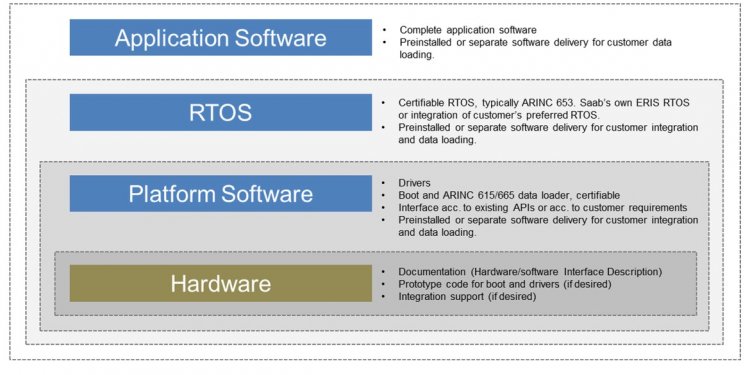
2. The following schematic shows how these elements fit together:
3. UAVN's APs are complete APs; they include an Air Data System (ADS - static and dynamic pressure gauges) and a GPS, both connected to an Internal Measurement System that contains accelerometers, gyroscopes, magnetometers and an internal CPU. These systems are connected to a flight control computer that implements aircraft control and communications with the GCS via a datalink and payload control.
 4. The schematic of a typical UAVN AP is as follows (AP04 shown in this example):
4. The schematic of a typical UAVN AP is as follows (AP04 shown in this example):
6. AP Navigation Control System Logic. The following diagram explains the logic behind the navigation control system:
Share this article
Related Posts



Latest Posts













